Minimum Spanning Trees
Week 14, Monday — Prim’s Algorithm
April 8, 2026
Muddy City
You can pave road segments. Each segment costs its number of paving stones.
Goal: pave the __________ stones so every house can reach every other.
Which roads do you pave?
How many stones total?
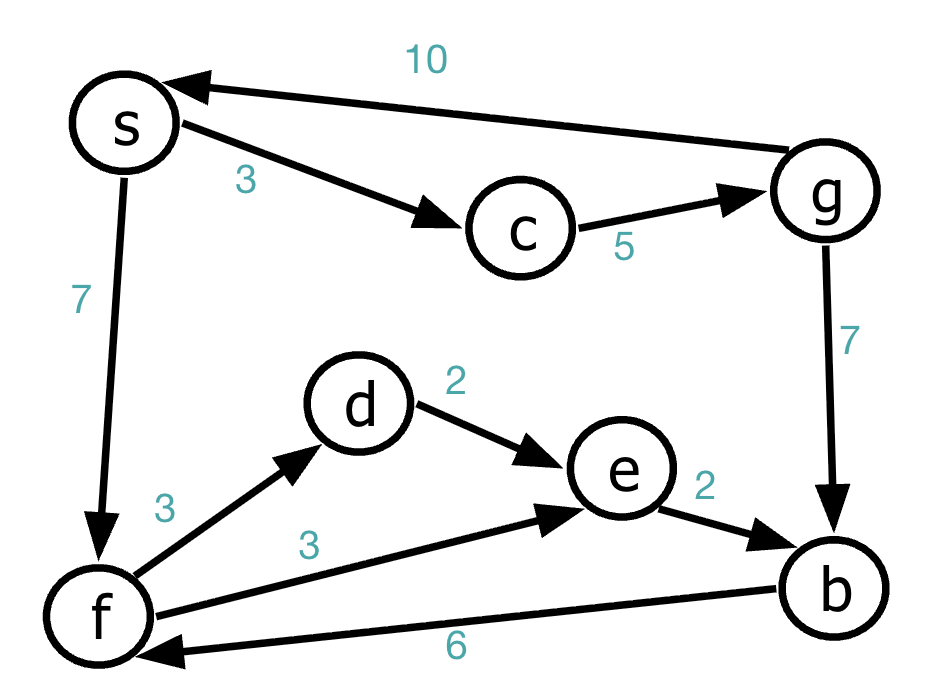
Single Source Shortest Path
- Input: directed graph \(G\) with non-negative edge weights, and a start vertex \(s\).
- Output: A subgraph \(G’\) consisting of the shortest (minimum total cost) paths from \(s\) to every other vertex in the graph.
Dijkstra’s Algorithm (1959)
Note:
SSSP Algorithm
Given a source vertex \(s\), we wish to find the shortest path from \(s\) to every other vertex in the graph.
Initialize structure:
d:p:
Repeat these steps:
- Label a new (unlabelled) vertex \(v\), whose shortest distance has been found
- Update \(v\)’s neighbors with improved distance and predecessor
SSSP Algorithm
Initialize structure:
- For all
v:d[v] = INF,p[v] = null - Let
d[s] = 0 - Initialize PQ by
d[v]
- For all
Repeat
ntimes:- Remove minimum
d[]unlabelled vertex:v - Label vertex
v - For all unlabelled neighbors
wofv:- If (________________ <
d[w])d[w] =________________p[w] = v
- If (________________ <
- Remove minimum
Return
p
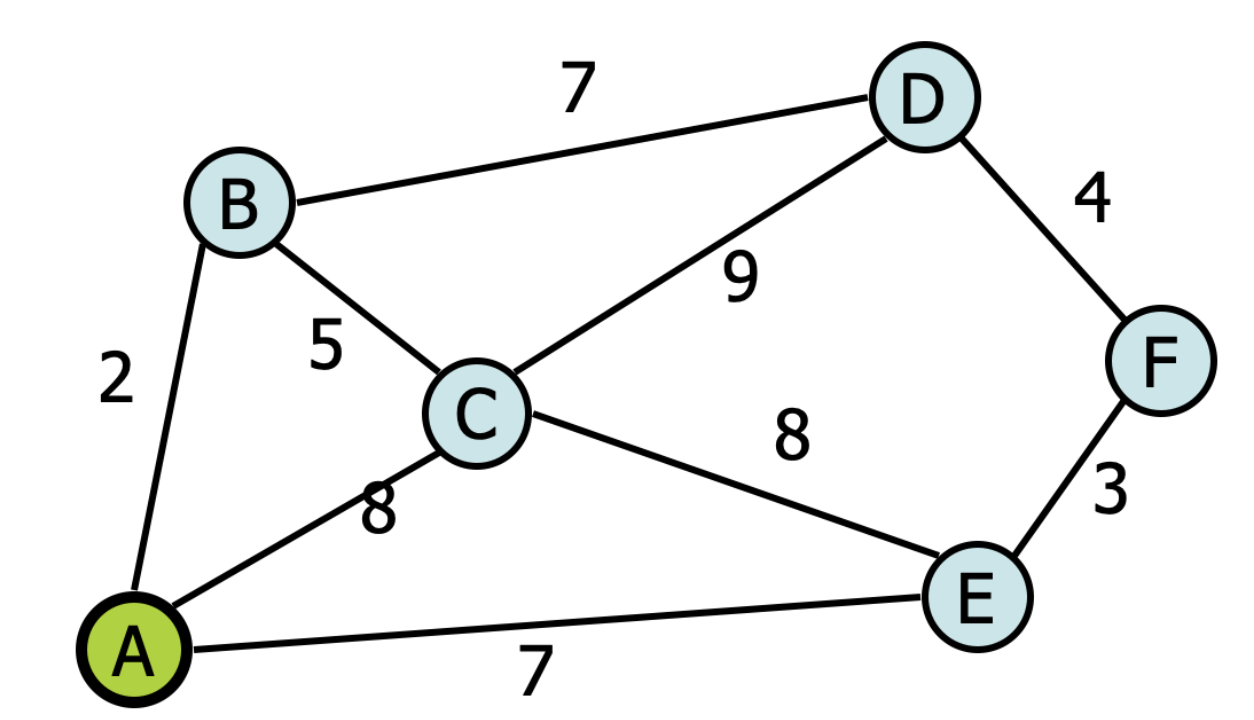
Your Turn
Execute Dijkstra’s algorithm on this graph: